Vodič - Izbor Kuebler enkodera prema rezoluciji i preciznosti
Sreda, 17 Novembar, 2021 : 13:29 Saveti i pomoć
Enkoderi su jako zastupljena komponenta u većini grana industrije ( drvna, metalska, izrada alatnih mašina itd.) , kao i kod specifičnih primena kod svih vrsta dizalica i kranova, građevinskih mašina, prenosnih traka i dr. Izbor enkodera se vrši po mnoštvu različitih parametara, koji su zavisni od same aplikacije. Postoje mehanički, električni i opšti kriterijumi za odgovarajući izbor enkodera, a u ovom tekstu će biti opisani termini rezolucije,tačnosti i preciznosti kao i veze između njih.
Ovaj vodič Vas upućuje, kako da na osnovu aplikacije, napravite ispravnu selekciju Kuebler enkodera. Svaka aplikacija ima određene zahteve u oblasti tačnosti, što ukazuje na početni korak : Definisanje zahteva aplikacije !
-Rezolucija se definiše kao najmanji pomak koji je moguće izmeriti ili posmatrati. Kod enkodera, rezolucija se definiše kao broj impulsa koji se emituju u toku jedne revolucije. Zahtevana rezolucija aplikacije u praksi određuje potrebni broj impulsa enkodera po revoluciji. U slučaju linearnog kretanja, ono se prvo mora pretvoriti u obrtno kretanje (npr.merni točak)
Jedinica za rezoluciju je broj pulseva(impulsa) po revoluciji ili „ppr“.
Mehanička rezolucija enkodera je uslovljena konstrukcijom i ne može se naknadno menjati.
Električna rezolucija pruža informaciju o najmanjoj distanci koja može biti izmerena. Ako podelimo punu rotaciju, 360 stepeni, sa ukupnim brojem impulsa po obrtaju, dobićemo rezultat promene ugla po jednom impulsu.
Npr. Rezolucija enkodera je 3600ppr, 360 ͦ / 3600 ppr = 0.1 ͦ / impuls , što znači da je pomeraj enkodera 0.1 ͦ u toku jednog impulsa.
-Definisanje rezolucije kod linearnog kretanja
Linearno pomeranje i potreba za linearnim enkoderima je veoma česta u industriji. Primarno, potrebno je konvertovati linearno u rotaciono pomeranje. To se može postići uz pomoć mernog točka ili enkodera sa sajlom.
Za primer, aplikacija sa mernim točkom, čiji je obim 200mm, zahteva tačnost od 0.1mm. Potrebna rezolucija enkodera jeste 200mm/0.1mm= 2000ppr

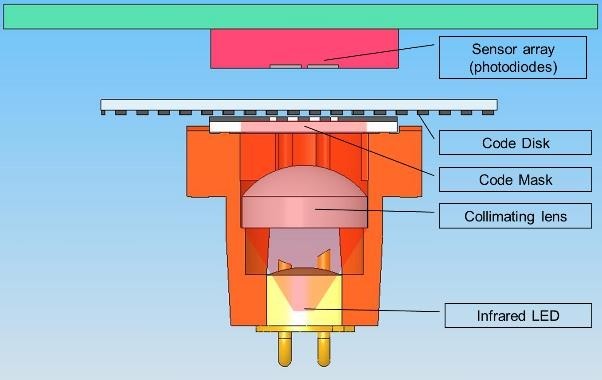
Na slikama gore može se videti uzdužni presek enkodera koji radi na optičkom principu merenja. Pri rotaciji vratila enkodera disk prelazi preko maske i senzorski niz je naizmenično pokriven svetlo / tama, što rezultira izlaznim sinusoidalnim signalom, koji se konvertuje u kvadratni signal Šmitovim komparatorom. Jedna promena svetlo/tama odgovara jednom impulsu. Enkoderi najčešće imaju od 1 do 5000ppr, zavisno od potreba, proizvođača, zahteva aplikacije i dr.
Magnetni princip merenja
Magnetni merni sistem se sastoji iz 2 komponente :
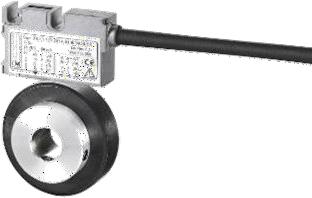
1. glava senzora sa integrisanom elektronskim komponentama
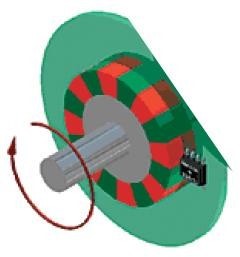
2. merni točak sa magnetnim polovima
Točak se sastoji od glavčine sa feromagnetnim slojem dodatim preko. Naizmenično su postavljeni severni i južni pol, a dužina jednog para polova je obično 2-5mm. Stoga, broj pari polova zavisi od spoljašnjeg prečnika točka. Glava senzora očitava promene severnog i južnog pola i na osnovu toga nastaje sinusoidalni signal. Za razliku od optičkih enkodera, kod magnetnih se signal prvo interpolira a zatim pretvara u kvadratni uz pomoć Šmitovog komparatora.
Rezolucija magnetnih enkodera se dobija kao umnožak broja pari polova i interpolacionog faktora.
-Broj kanala enkodera
Bitno je napomenuti i podelu inkrementalnih enkodera po broju kanala :
1) Jednokanalni enkoderi koji se koriste kada je smer rotacije nevvažan za konkretnu aplikaciju, npr.pri merenju brzine ili dužine.
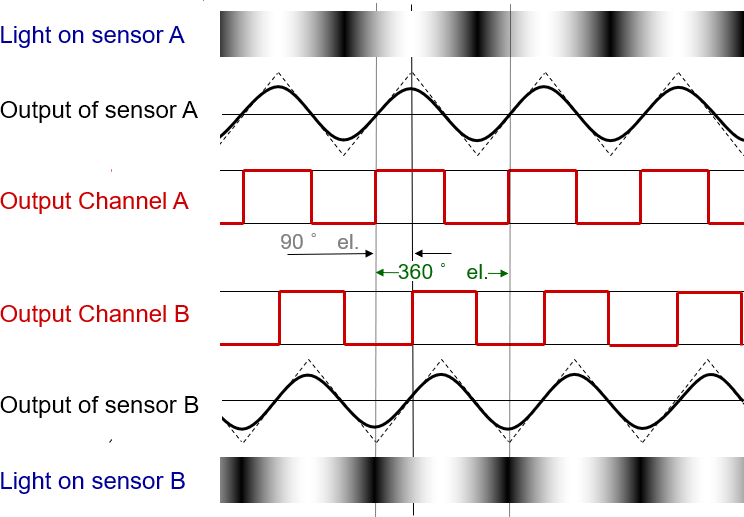
2) Dvokanalni enkoderi poseduju 2 kanala, koji se obično označavaju sa A i B i električno su pomereni za 90 ͦ jedan u odnosu na drugiͦ. Smer kretanja se određuje u odnosu na to koji kanal prednjači. Kanal A prednjači kanalu B ukoliko se vratilo enkodera okreće u smeru kazaljke na satu, gledajući u prirubnicu enkodera. Korišćenje dvokanalnih enkodera je uglavnom kod aplikacija gde je smer rotacije bitan, npr.pozicioniranje i sl.
3) Trokanalni enkoderi
U dodatku 2 kanala A i B, u nekim izvedbama enkodera, može postojati i treći ( nulti ) kanal, koji se označava sa 0 ili Z, koji se koristi za takozvano nulovanje, radi određivanja referentne pozicije. Nulti kanal je ograničen kanalima A i B.
*Invertovani signali
Kod aplikacija gde se očekuju elektromagnetne smetnje na signalnim kablovima ili se radi o kablovima velike dužine, obično postoje dodatni invertovani signali. Oni su standardna opcija kod Kuebler enkodera za tip izlaza RS422 i opcionalno za Push-pull tip izlaza.
- Izlazna ( pulsna ) učestanost enkodera
Pulsna izlazna učestanost enkodera se mora posmatrati kroz 2 aspekta :
1.Koja je najveća dozvoljena izlazna učestanost posmatranog enkodera? Obično se za standardne enkodere u tehničkoj specifikaciji proizvoda navodi 300kHz, a za specijalne do 800kHz.
2. Koja je ulazna frekvencija impulsa kontrolera ili dodatne enkoderske kartice. Imajte u vidu da izlazna frekvencija enkodera ne sme premašiti vrednost ulazne frekvencije kontrolera ili kartice. Podaci o frekvenciji enkoderskog ulaza na kontroleru ili kartici se mogu naći u dokumentaciji proizvođača.
Primer :
Brzina : 3000 rpm ; rezolucija enkodera : 1000 ppr
Pulsna učestanost = ( 3000x1000)/60 = 50kHz , zaključak je da bi u ovom slučaju pulsni ulaz na kontroleru morao da može da prihvati izlaznu pulsnu učestanost od 50 kHz.
- Rezolucija u zavisnosti od aplikacije
Enkoderi svih proizvođača dostupni su sa različitim mogućnostima rezolucije. Često i cena istog tipa enkodera zavisi od izabrane rezolucije. Standardni enkoderi proizvođača Kuebler, dostupni su sa rezolucijom od 1ppr do 5000ppr, a specijalni enkoderi visoke rezolucije čak do 36000ppr.
Da li je za svaku aplikaciju poželjno odabrati najveću moguću rezoluciju? Naravno da ne. Pitanje pre svega zavisi od primene. Za primer, pri velikim brzinama, ako je izabrana visoka rezolucija, pulsna izlazna učestanost može biti previsoka ili ulazna frekvencija evaluacije preniska. Sa druge strane, kod aplikacija sa veoma sporim pokretima, logičnije je izabrati visoku rezoluciju enkodera, kako bi se detektovao i najmanji mogući pomak.
-Tačnost
Tačnost generalno opisuje slaganje ciljane izmerene vrednosti sa stvarno izmerenom vrednošću.
.jpg)
Tačnost enkodera je data u električnim stepenima ili kao deo perioda.
Tačnost enkodera zavisi od sledećih uticaja :
-Greške u podeli mreže diska enkodera
-Greške u podeli mreže maske enkodera
-Ekcentričnosti diska prema vratilu
-Odstupanje usled proklizavanja ležaja
Takođe, merenje tačnosti je dosta dug I složen proces, koji zahteva dobro kalibrisanu sofisticiranu mernu opremu u kojoj se vratilo enkodera pomera, a izlazne vrednosti upoređuju sa visoko preciznim referentnim sistemom. Osim opreme, proces zahteva I puno vremena, stoga se u fabrici našeg dobavljača Kuebler tačnost ne meri za svaki komad pojedinačno, jer bi u tom slučaju cena I rok isporuke bio znatno veći.
Podaci o tačnosti izražavaju se u ugaonim minutima I ugaonim sekundama. Pored toga, daje se tipična I minimalna tačnost.
Naš primer : Radi se o enkoderu Sendix 5000 sa rezolucijom od 2048ppr. Tipična tačnost je 45 ugaonih sekundi ili 0.0125 ͦ.
Minimalna tačnost je 75 ugaonih sekundi ili 0.,020833 ͦ.
Ove vrednosti su dobijene u uslovima kada je vratilo rasterećeno I na temperaturi enkodera između 20 I 40 stepeni Celzijusa.
Generalno, enkoder je uvek samo deo celokupnog sistema, tako da za određivanje ukupne preciznosti sistema/aplikacije moraju biti razmatrani I ostali delovi sistema :
-motor, vratilo motora
-spojnica enkodera
-način montaže enkodera
-spoljašnji uticaji poput temperature ambijenta
-Ponovljivost I preciznost
Kako je objašnjeno u prethodnom tekstu, tačnost se može odrediti rotacijom enkodera za 360 ugaonih stepeni I pri toj rotaciji se vrši merenje tj.poređenje tačnosti sa referentnim merenjem. Pitanje je da li bismo pri ponovnoj rotaciji enkodera imali istu ili različitu grešku, da li je I greška ponovljiva ili na tačnost ne utiče broj ponavljanja I šta bi se npr.desilo pri četvrtoj, petoj rotaciji? Da li se greška ponavlja ili može biti promenljiva?
- Zaključak
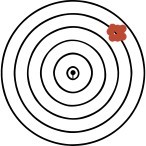
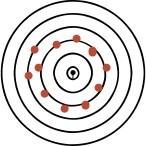
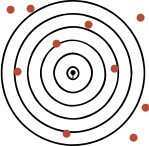
U oblasti izbora enkodera, prema zahtevanim karakteristikama, postoje tri pojma od najvećeg značaja :
1) Rezolucija koja je već ranije definisana kao broj impulsa po obrtaju.
2) Tačnost koja predstavlja razliku između prave I trenutne pozicije.
3) Preciznost – razlika između ponovljenih merenja pod istim uslovima
Iako ova tri pojma deluju dosta slično, potpuno su nezavisni , a pravilno razumevanje ovih pojmova može značajno uticati na donošenje ispravne odluke o izboru enkodera.
Na ilustracijama ispod predstavljeno je praktično poređenje ova 3 termina.
Par praktičnih saveta od Kuebler-a za izbor enkodera u zavisnosti od zahteva aplikacije :
Prvi primer: Treba izabrati enkoder visoke rezolucije, velika tačnost nije neophodna, kod primena gde je potrebna kontrola brzine, a brzine su dosta male.
Drugi primer : Treba izabrati inkrementalni enkoder visoke rezolucije I visoke tačnosti kod primena enkodera u CNC mašinama.
Ovaj vodič Vas upućuje, kako da na osnovu aplikacije, napravite ispravnu selekciju Kuebler enkodera. Svaka aplikacija ima određene zahteve u oblasti tačnosti, što ukazuje na početni korak : Definisanje zahteva aplikacije !
-Rezolucija se definiše kao najmanji pomak koji je moguće izmeriti ili posmatrati. Kod enkodera, rezolucija se definiše kao broj impulsa koji se emituju u toku jedne revolucije. Zahtevana rezolucija aplikacije u praksi određuje potrebni broj impulsa enkodera po revoluciji. U slučaju linearnog kretanja, ono se prvo mora pretvoriti u obrtno kretanje (npr.merni točak)
Jedinica za rezoluciju je broj pulseva(impulsa) po revoluciji ili „ppr“.
Mehanička rezolucija enkodera je uslovljena konstrukcijom i ne može se naknadno menjati.
Električna rezolucija pruža informaciju o najmanjoj distanci koja može biti izmerena. Ako podelimo punu rotaciju, 360 stepeni, sa ukupnim brojem impulsa po obrtaju, dobićemo rezultat promene ugla po jednom impulsu.
Npr. Rezolucija enkodera je 3600ppr, 360 ͦ / 3600 ppr = 0.1 ͦ / impuls , što znači da je pomeraj enkodera 0.1 ͦ u toku jednog impulsa.
-Definisanje rezolucije kod linearnog kretanja
Linearno pomeranje i potreba za linearnim enkoderima je veoma česta u industriji. Primarno, potrebno je konvertovati linearno u rotaciono pomeranje. To se može postići uz pomoć mernog točka ili enkodera sa sajlom.
Za primer, aplikacija sa mernim točkom, čiji je obim 200mm, zahteva tačnost od 0.1mm. Potrebna rezolucija enkodera jeste 200mm/0.1mm= 2000ppr
Na slikama gore može se videti uzdužni presek enkodera koji radi na optičkom principu merenja. Pri rotaciji vratila enkodera disk prelazi preko maske i senzorski niz je naizmenično pokriven svetlo / tama, što rezultira izlaznim sinusoidalnim signalom, koji se konvertuje u kvadratni signal Šmitovim komparatorom. Jedna promena svetlo/tama odgovara jednom impulsu. Enkoderi najčešće imaju od 1 do 5000ppr, zavisno od potreba, proizvođača, zahteva aplikacije i dr.
Magnetni princip merenja
Magnetni merni sistem se sastoji iz 2 komponente :
1. glava senzora sa integrisanom elektronskim komponentama
2. merni točak sa magnetnim polovima
Točak se sastoji od glavčine sa feromagnetnim slojem dodatim preko. Naizmenično su postavljeni severni i južni pol, a dužina jednog para polova je obično 2-5mm. Stoga, broj pari polova zavisi od spoljašnjeg prečnika točka. Glava senzora očitava promene severnog i južnog pola i na osnovu toga nastaje sinusoidalni signal. Za razliku od optičkih enkodera, kod magnetnih se signal prvo interpolira a zatim pretvara u kvadratni uz pomoć Šmitovog komparatora.
Rezolucija magnetnih enkodera se dobija kao umnožak broja pari polova i interpolacionog faktora.
-Broj kanala enkodera
Bitno je napomenuti i podelu inkrementalnih enkodera po broju kanala :
1) Jednokanalni enkoderi koji se koriste kada je smer rotacije nevvažan za konkretnu aplikaciju, npr.pri merenju brzine ili dužine.
2) Dvokanalni enkoderi poseduju 2 kanala, koji se obično označavaju sa A i B i električno su pomereni za 90 ͦ jedan u odnosu na drugiͦ. Smer kretanja se određuje u odnosu na to koji kanal prednjači. Kanal A prednjači kanalu B ukoliko se vratilo enkodera okreće u smeru kazaljke na satu, gledajući u prirubnicu enkodera. Korišćenje dvokanalnih enkodera je uglavnom kod aplikacija gde je smer rotacije bitan, npr.pozicioniranje i sl.
3) Trokanalni enkoderi
U dodatku 2 kanala A i B, u nekim izvedbama enkodera, može postojati i treći ( nulti ) kanal, koji se označava sa 0 ili Z, koji se koristi za takozvano nulovanje, radi određivanja referentne pozicije. Nulti kanal je ograničen kanalima A i B.
*Invertovani signali
Kod aplikacija gde se očekuju elektromagnetne smetnje na signalnim kablovima ili se radi o kablovima velike dužine, obično postoje dodatni invertovani signali. Oni su standardna opcija kod Kuebler enkodera za tip izlaza RS422 i opcionalno za Push-pull tip izlaza.
- Izlazna ( pulsna ) učestanost enkodera
Pulsna izlazna učestanost enkodera se mora posmatrati kroz 2 aspekta :
1.Koja je najveća dozvoljena izlazna učestanost posmatranog enkodera? Obično se za standardne enkodere u tehničkoj specifikaciji proizvoda navodi 300kHz, a za specijalne do 800kHz.
2. Koja je ulazna frekvencija impulsa kontrolera ili dodatne enkoderske kartice. Imajte u vidu da izlazna frekvencija enkodera ne sme premašiti vrednost ulazne frekvencije kontrolera ili kartice. Podaci o frekvenciji enkoderskog ulaza na kontroleru ili kartici se mogu naći u dokumentaciji proizvođača.
Primer :
Brzina : 3000 rpm ; rezolucija enkodera : 1000 ppr
Pulsna učestanost = ( 3000x1000)/60 = 50kHz , zaključak je da bi u ovom slučaju pulsni ulaz na kontroleru morao da može da prihvati izlaznu pulsnu učestanost od 50 kHz.
- Rezolucija u zavisnosti od aplikacije
Enkoderi svih proizvođača dostupni su sa različitim mogućnostima rezolucije. Često i cena istog tipa enkodera zavisi od izabrane rezolucije. Standardni enkoderi proizvođača Kuebler, dostupni su sa rezolucijom od 1ppr do 5000ppr, a specijalni enkoderi visoke rezolucije čak do 36000ppr.
Da li je za svaku aplikaciju poželjno odabrati najveću moguću rezoluciju? Naravno da ne. Pitanje pre svega zavisi od primene. Za primer, pri velikim brzinama, ako je izabrana visoka rezolucija, pulsna izlazna učestanost može biti previsoka ili ulazna frekvencija evaluacije preniska. Sa druge strane, kod aplikacija sa veoma sporim pokretima, logičnije je izabrati visoku rezoluciju enkodera, kako bi se detektovao i najmanji mogući pomak.
-Tačnost
Tačnost generalno opisuje slaganje ciljane izmerene vrednosti sa stvarno izmerenom vrednošću.
Tačnost enkodera je data u električnim stepenima ili kao deo perioda.
Tačnost enkodera zavisi od sledećih uticaja :
-Greške u podeli mreže diska enkodera
-Greške u podeli mreže maske enkodera
-Ekcentričnosti diska prema vratilu
-Odstupanje usled proklizavanja ležaja
Takođe, merenje tačnosti je dosta dug I složen proces, koji zahteva dobro kalibrisanu sofisticiranu mernu opremu u kojoj se vratilo enkodera pomera, a izlazne vrednosti upoređuju sa visoko preciznim referentnim sistemom. Osim opreme, proces zahteva I puno vremena, stoga se u fabrici našeg dobavljača Kuebler tačnost ne meri za svaki komad pojedinačno, jer bi u tom slučaju cena I rok isporuke bio znatno veći.
Podaci o tačnosti izražavaju se u ugaonim minutima I ugaonim sekundama. Pored toga, daje se tipična I minimalna tačnost.
Naš primer : Radi se o enkoderu Sendix 5000 sa rezolucijom od 2048ppr. Tipična tačnost je 45 ugaonih sekundi ili 0.0125 ͦ.
Minimalna tačnost je 75 ugaonih sekundi ili 0.,020833 ͦ.
Ove vrednosti su dobijene u uslovima kada je vratilo rasterećeno I na temperaturi enkodera između 20 I 40 stepeni Celzijusa.
Generalno, enkoder je uvek samo deo celokupnog sistema, tako da za određivanje ukupne preciznosti sistema/aplikacije moraju biti razmatrani I ostali delovi sistema :
-motor, vratilo motora
-spojnica enkodera
-način montaže enkodera
-spoljašnji uticaji poput temperature ambijenta
-Ponovljivost I preciznost
Kako je objašnjeno u prethodnom tekstu, tačnost se može odrediti rotacijom enkodera za 360 ugaonih stepeni I pri toj rotaciji se vrši merenje tj.poređenje tačnosti sa referentnim merenjem. Pitanje je da li bismo pri ponovnoj rotaciji enkodera imali istu ili različitu grešku, da li je I greška ponovljiva ili na tačnost ne utiče broj ponavljanja I šta bi se npr.desilo pri četvrtoj, petoj rotaciji? Da li se greška ponavlja ili može biti promenljiva?
- Zaključak
U oblasti izbora enkodera, prema zahtevanim karakteristikama, postoje tri pojma od najvećeg značaja :
1) Rezolucija koja je već ranije definisana kao broj impulsa po obrtaju.
2) Tačnost koja predstavlja razliku između prave I trenutne pozicije.
3) Preciznost – razlika između ponovljenih merenja pod istim uslovima
Iako ova tri pojma deluju dosta slično, potpuno su nezavisni , a pravilno razumevanje ovih pojmova može značajno uticati na donošenje ispravne odluke o izboru enkodera.
Na ilustracijama ispod predstavljeno je praktično poređenje ova 3 termina.
Par praktičnih saveta od Kuebler-a za izbor enkodera u zavisnosti od zahteva aplikacije :
Prvi primer: Treba izabrati enkoder visoke rezolucije, velika tačnost nije neophodna, kod primena gde je potrebna kontrola brzine, a brzine su dosta male.
Drugi primer : Treba izabrati inkrementalni enkoder visoke rezolucije I visoke tačnosti kod primena enkodera u CNC mašinama.
 .jpg) |
  |
  |
  |
|
|
|
|





