
















Enkoderi
Enkoderi su uređaji koji pretvaraju mehanički u električni signal, pogodan za dalju obradu. Predstavljaju bitan element u svim elektromotornim pogonima. Koriste se za merenje pozicije, ugla, brzine, linearnog pomeraja i sl. Enkoderi su nezamenljivi deo svakog regulisanog elektromotornog pogona i njihova primena je važna kod upravljanja u zatvorenoj petlji, kod aplikacija gde je potrebna preciznost u upravljanju. Opseg primene enkodera je veliki i obuhvata većinu alatnih mašina u industriji, specijalnih mašina, mašina pakerica, liftove, kranove i dizalice. Enkoderi svoje učešće nalaze i u specifičnim visoko tehnološkim projektima industrijske automatizacije, zatim robotike, kao i kod velikih motora i generatora.
Electro Pneumatic Solutions na polju enkodera sarađuje sa renomiranim nemačkim proizvođačem Kuebler ( Kübler ) koji u svojoj paleti proizvoda ima sve vrste enkodera:
-
Rešenja u oblasti tehnologije liftova
-
Osovinski kopirni sistemi - Apsolutno pozicioniranje kabine lifta za visine putovanja do 392 m - Bezbedan, precizan, robustan - Bezbednost: SIL3 sertifikat - Dinamično: Brzina putovanja do 12 m/s - Precizno: Rezolucija do 0,5 mm - Direktno: Apsolutno pozicioniranje
- Industrija liftova - Praćenje položaja i brzine bez klizanja, Realizacija bezbednosnih funkcija, Elektronski regulator brzine, Digitalizacija liftovskih sistema, Prediktivno održavanje
- Intralogistika - kranovi za slaganje - Precizno pozicioniranje, Nadzor brzine, Aktiviranje sigurnosnih mehanizama
- Logistika - Mosne dizalice - Precizno pozicioniranje, Nadzor brzine
- Apsolutno detektovanje pozicije – Ants LEB02
- Sigurno detektovanje pozicije – Ants LES02
- Sigurno detektovanje pozicije i brzine – Ants LES03
- Aktiviranje i praćenje sigurnosnih mehanizama – SGT02
- Realizovanje sigurnosnih funkcija – PSU02
-
Enkoderi za motore bez reduktora – Optimalna kontrola sa visokorezolucijskim singleturn eknoderima
- Standard za motore bez reduktora – apsolutni singleturn enkoder Sendix 5873 motor line
-
Enkoderi za motore sa reduktorima – Pouzdana regulacija brzine sa inkrementalnim enkoderima
-
Enkoderi bez ležajeva za motore sa spoljnim rotorom (tzv. pancake (palačinka) motore) - Pouzdana regulacija brzine sa magnetnim enkoderima bez ležaja
-
-
Rešenja u oblasti tehnologije upravljanja sistemima/motorima
-
Sistemi povratne sprege motora za servo motore - Konstantna dimenzija Ø 36,5 mm znači ogromne prednosti za vas - visok kvalitet kontrole pogona zahvaljujući visokom kvalitetu signala- Maksimalna fleksibilnost: svi električni interfejsi - Funkcionalna sigurnost do SIL3//Ple - Rezolucija ≤ 2048 ppr SinCos ili ≤ 24-bitna potpuno digitalna
-
Enkoderi za asinhrone motore - Optimalna povratna informacija o brzini i detekcija položaja sa Kubler enkoderima
-
Enkoderi za velike motore / generatore – Merenje brzine sa inkrementalnim enkoderima - Za najteže uslove – izuzetno robusni senzori - Enkoderi za teške uslove rada - Enkoderi bez ležajeva - Optički ili magnetni - Posebno otporan na udarce i vibracije - Za brojne prečnike osovine
- Za osovinu prečnika do 42mm – A020 / A02H
- Za zahtevne/teške aplikacije – Sendix H100 / Sendix H120
-
Enkoder za koračne (step) motore - Merenje brzine sa inkrementalnim minijaturnim i kompaktnim enkoderima - Visoka rezolucija u najmanjem prostoru - Dimenzija od ø 24 mm do ø 37 mm - Optičko ili magnetno skeniranje - Inkrementalni merni sistem - Rezolucija do 2500 ppr. - Varijante osovine i šuplje osovine
-
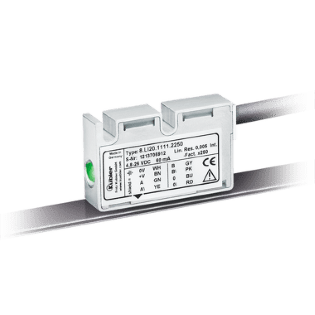
Magnetni sistemi za merenje dužine za linearne motore - Beskontaktno merenje položaja pogodno za najteža okruženja - Robustan i pouzdan - Raznovrsna upotreba – inkrementalna i apsolutna - Robusni senzori – Zaštita IP69k - Jednostavna montaža – Magnetna traka sa lepljivim trakama - Tehnologija bez habanja – Beskontaktni princip merenja - Dizajn koji štedi prostor – Kompaktan dizajn
- Inkrementalni – Limes LI20 / Limes LI50
- Apsolutni – Limes LA10 / Limes LA50
-
-
Rešenja u teškoj industriji
-
Rešenja za teške dizalice/kranove - Enkoderi za pozicioniranje i merenje brzine - Robustan i izdržljiv - Inkrementalni i apsolutni rotacioni enkoderi - Pogodno za spoljašnju upotrebu - Detekcija brzine i položaja - Visok stepen zaštite do IP69k - CANopen interfejs i mnogi drugi
- Položaj kolica – Sendix M366xR – M3661R, M3663R, M3668R
- Brzina podizanja – Sendix H100 / Sendix H120
- Ugao kraka / krajnji položaj – Sendix M3658
- Kontrola pomeranja – Sendix 58xx CANopen – 5868 CANopen / 5888 CANopen
- Brzina – Sendix 5000 / 5020
-
Rešenja za industriju čelika - Visoka dostupnost sistema: Merenje brzine i pozicioniranje pomoću Kubler senzora - Robustan i izdržljiv - Inkrementalni i apsolutni rotacioni enkoderi - Sistemi optičkih vlakana - Funkcionalna sigurnost - Pogodno za ekstremne primene
- Za najteže slučajeve – izuzetno robustan – Sendix H100 / Sendix H120
- Enkoder sa euro prirubnicom – Sendix 5000
- Fieldbus i Ethernet komunikacija – Sendix 58xx - 5868 / 5888
- Za temperature do 110 stepeni Celzijusa – 5803 / 5823
- Merenje dužine – Draw-wire enkoderi B80, D120, D135
-
-
Rešenja u prenosnoj/pokretnoj automatici
-
Rešenja za građevinske mašine - Pozicioniranje, merenje ugla i nivelisanje sa Kubler senzorskim rešenjima - Robustan i izdržljiv proizvod - Enkoderi, inklinometri, enkoderi sa vučnom žicom - Pogodno za nadzemne i podzemne radove - CANopen interfejs - Visok stepen zaštite do IP69k
- Ugao rotacije nosača za betoniranje – Multiturn enkoder Sendix M3668R
- Merenje ugla ugradnje, Nivelisanje vozila dinamično, precizno – Inklinomer IN88 CANopen
- Položaj potpornog nosača - Draw wire enkoder C100
-
Rešenja za automatska vođena vozila / Logistika - Detekcija brzine i nadzor ugla upravljanja pomoću Kubler senzora - Precizno i pouzdano - Inkrementalni i apsolutni rotacioni enkoderi – Draw-wire enkoderi - Optimalna brzina prenosa - Precizno praćenje ugla upravljanja - Merenje visine dizanja
- Merenje brzine vožnje – Inkrementalni enkoder 2420
- Praćenje ugla upravljanja – Singleturn enkoder M3668 CANopen
- Praćenje visine dizanja do 3 m – Draw-wire enkoder B80
- IO Link enkoderi za zadatke automatizacije – Sendix M36 / M58 – M3668, M3688, M5868
- Praćenje visine dizanja do 6 m – Draw-wire enkoder C120
- Detektovanje brzine sa inkrementalnim enkoderima – 3620, RLI20, Sendix 5834FS
- Praćenje ugla upravljanja i detektovanje brzine – Sendix 5834FS, Sendix F5888 CANopen
-
Rešenja za pokretne dizalice - Pozicioniranje, merenje ugla i nivelisanje sa Kubler senzorskim rešenjima - Pouzdan i čvrst - Enkoderi, draw-wire enkoderi i inklinometri - Analogni ili CANopen interfejs - Visok stepen zaštite do IP69k - Pogodno za spoljašnju upotrebu - Kompetentan savet i visok kvalitet usluge
- Rotacija kupole – Apsolutni multiturn enkoder Sendix F5868 CANopen i Sendix M3668R
- Merenje ugla ugradnje/postavljanja – Singleturn enkoder Sendix M3658 / M3678, Inklinomer IN88 CANopen
- Nivelisanje vozila - Inklinomer IN88 CANopen
- Položaj potpornog nosača – Draw-wire enkoderi A40 / A41 i C100
- Merenje dužine kraka – Draw-wire enkoder D125, Apsolutni multiturn enkoder M3668 / M3688
-
Rešenja za komunalnu tehniku / Spasilačka vozila - Kubler senzori za besprekornu kontinuiranu upotrebu - Pouzdana senzorska rešenja- Enkoderi i draw-wire enkoderi - Inklinometri i klizni prstenovi - Pogodno za spoljašnju upotrebu - CANopen interfejs - Visok stepen zaštite do IP69k
- Rotacija merdevina / Dužina merdevina – Multiturn enkoder Sendix 5868 CANopen
- Prenos podataka i snage – Klizni prsten SR160
- Horizontalni položaj kaveza – Inklinomer IN88 CANopen
- Merenje položaja kraka do 2 m – Draw-wire enkoder A40 / A41
- Ugao postavljanja merdevina – Singleturn enkoder Sendix M36 – M3668, M3658, M3688, M3678
-
Rešenja za specijalna vozila - Kubler senzorska rešenja za pouzdanu primenu - Robustan i izdržljiv - Enkoderi, inklinometri, draw-wire enkoderi - Automatizacija nadzora - Pozicioniranje, nivelisanje i još mnogo toga - Kompetentan savet i visok kvalitet usluge - Globalno prisustvo u preko 50 zemalja
- Ugao rotacije jarbola – Multiturn enkoder Sendix M3661
- Visina kraka i nivelisanje – Inklinomer IN81 analog
- Dužina teleskopskog jarbola – Draw-wire enkoder B75
-
Rešenja za poljoprivredne i šumarske mašine - Kubler senzori za besprekornu kontinuiranu upotrebu - Pouzdana senzorska rešenja - Enkoderi i inklinometri - Pogodno za spoljašnju upotrebu - Visok stepen zaštite do IP69k - Kompetentan savet i visok kvalitet usluge - Globalno prisustvo u preko 50 zemalja
- Apsolutno merenje ugla podešavanja recimo lista testere – Multiturn enkoder M3668 / M3688
- Brzina i položaj uvlačenja – Inkrementalni enkoder Sendix 5000
- Nivelisanje vozila dinamično, precizno – Inklinomer IN88 CANopen
- Prenos opterećenja, podataka i signala - Prilagođeno rešenje sa kliznim prstenom
-
-
Rešenja u industriji pakovanja
-
Klizni prsten SR060E
-
Prenos snage, signala i podataka sa modularnim kliznim prstenovima
-
Pozicioniranje i praćenje brzine pomoću optičkih enkodera i linearnih mernih sistema
- Uzak prostor – enkoderi 2400 / 2420
- Ekonomično rešenje – enkoderi KIS40 / KIH40
- Jedinstveno svestran - Sendix 5000 / 5020
- Rotacioni enkoderi sa IO Link – M36 / M58 – M3668, M3688, M5868
- Inkrementalni enkoderi sa nerđajućim čeilokom – Sendix 5006 / 5026
- SSI interfejs – Sendix 5853 / 5873
- Apsolutni enkoder bez ležaja – Sendix F36xx / F58xx
- Fieldbus i Ethernet komunikacija – Sendix 58xx - 5868 / 5888
-
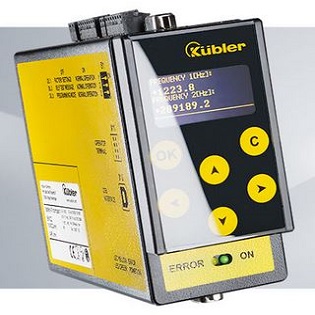
Detekcija, kontrola i vizuelizacija sa brojačima i procesnim kontrolerima
- Tahometri / displeji sa prikazom frekvencije
- Predefinisani brojači
- Merači sati / tajmeri
- Pulsni brojači
- Displeji sa prikazom pozicije
- IO-Link ekrani na dodir i procesni kontroleri
-
-
Rešenja u postrojenjima za flaširanje proizvoda
-
Klizni prstenovi u fabrikama za punjenje
-
Pozicioniranje i praćenje brzine pomoću optičkih enkodera i linearnih mernih sistema
- Uzak prostor – enkoderi 2400 / 2420
- Ekonomično rešenje – enkoderi KIS40 / KIH40
- Jedinstveno svestran - Sendix 5000 / 5020
- Rotacioni enkoderi sa IO Link – M36 / M58 – M3668, M3688, M5868
- Inkrementalni enkoderi sa nerđajućim čeilokom – Sendix 5006 / 5026
- SSI interfejs – Sendix 5853 / 5873
- Apsolutni enkoder bez ležaja – Sendix F36xx / F58xx
- Fieldbus i Ethernet komunikacija – Sendix 58xx - 5868 / 5888
-
Detekcija, kontrola i vizuelizacija sa brojačima i procesnim kontrolerima
- Tahometri / displeji sa prikazom frekvencije
- Predefinisani brojači
- Merači sati / tajmeri
- Pulsni brojači
- Displeji sa prikazom pozicije
- IO-Link ekrani na dodir i procesni kontroleri
-
-
Rešenja u oblasti solarne industrije
-
Kontrola elevacije i azimuta heliostata
-
Regulisanje ugaonog položaja paraboličkih sistema korita
- Sistem inkrementalnog merenja dužine – Limes LI50 / B2
- Fieldbus apsolutni multiturn enkoder Sendix F5868 / F5888
- SSI apsolutni multiturn enkoder Sendix F5863 / F5883
- Singleturn enkoderi za uzak prostor – Sendix 3651 / 3671
- Kompaktni multiturn enkoderi sa 58mm prirubnicom – Sendix M5861
- Inklinomeri IN88
-
Praćenje fotonaponskih sistema
-
-
Rešenja u oblasti vetroelektrana
-
Kontrola nagiba i azimuta
- Kontrola azimuta detekcijom pozicije – multiturn Sendix M36xx, PROFIsafe Sendix S58xxFS3
- Kontrola azimuta motora merenjem brzine – Sendix 5000 / 5020
- Kontrola nagiba motora multiturn enkoderima – Sendix 58xx
- Plaćenje ugla lopatice rotora – Sendix 5863
-
Merenje brzine rotora i osovine generatora
-
Klizni prstenovi i tehnologija prenosa
-
Funkcionalna sigurnost
-
Otkrivanje prevelikih brzina sa bezbednim celokupnim sistemom
-
Detekcija prevelikih brzina sa dva inkrementalna enkodera
-
-
Postoji više podela enkodera. Ona najznačajnija je podela po principu rada. Na toj osnovi, postoje inkrementalni i apsolutni enkoderi.
Ističemo i podelu prema vrsti osovine, u tom smislu postoje enkoderi sa punom i sa šupljom osovinom. Korišćenje šuplje osovine smanjuje troškove instalacije za 30%, a i potrebno im je 50% manje mesta nego za instalaciju enkodera sa punom osovinom. Takođe, za montažu enkodera sa šupljom osovinom nije potrebna dodatna mehanička oprema( npr.spojnice).
-Princip rada apsolutnih i inkrementalnih enkodera
Kod apsolutnih optičkih enkodera, položaj osovine motora se dobija neposrednim očitavanjem kodovane pozicije sa diska. Za kodovanje se najčešće koristi Grayov ili binarno ciklični kod u kome se kodovane vrednosti bilo koja dva susedna broja razlikuju samo u jednom bitu. Na ovaj način, smanjuje se greška u detekciji ugla koja može biti najviše jedan priraštaj detektovane veličine. Detektovana vrednost se pre dovođenja u procesor mora prevesti iz binarno cikličnog u običan binarni kod.
Inkrementalni optički enkoder opremljen je providnim diskom na kome su gusto naneti neprovidni ekvidistantni markeri. Za očitavanje markera koristi se svetlosni detektor. U toku obrtanja diska, svetlosni detektor generiše povorku impulsa koja služi kao takt za punjenje dvosmernog brojača. Svakom impulsu inkrementalnog enkodera odgovara priraštaj ugla od jednog kvanta. Na taj način, pri svakom očitavanju, u brojaču se nalazi digitalni ekvivalent inkrementa pozicije. Sabiranjem sukcesivnih vrednosti brojača dobija se digitalni ekvivalent pozicije koja se meri.
Sinusni signal se procesuira u elektronskom kolu enkodera. Najveći broj kontrolera zahteva kvadratni signal na svom ulazu. Zato se signali unapred obrađuju u enkoderu.
-Broj kanala enkodera
Enkoderi mogu imati više izlaznih kanala. Enkoderi sa jednim izlaznim kanalom se koriste kada smer obrtanja nije bitno detektovati.( npr.merenje brzine, dužine), dok se enkoderi sa dva izlazna kanala primenjuju kada je smer rotacije bitan( npr.kod aplikacija gde je zahtevano pozicioniranje). Signali sa kanala A i B su fazno pomereni za 90 stepeni. U zavisnosti od toga koji signal prednjači, određuje se smer rotacije.
Dodatak je kod enkodera sa 3 izlazna kanala, što postoji kanal 0, koji se uobičajeno koristi za kalibraciju mašine( kao referentni ciklus).
Izlazni kanali enkodera se obično označavaju sa A,B i 0. Veoma često se umesto osnovnih, koriste invertovani tj.komplementarni signali Ak , Bk , 0k zbog uticaja električnih smetnji na osnovne signale.
-Rezolucije
Rezolucija enkodera predstavlja broj impulsa po krugu. Obično se označava sa Nimp a jedinica je ppr(pulses per revolution). Uobičajene vrednosti su 1024ppr, 2048ppr, 4096ppr. Rezolucija dvo-kanalnog enkodera može se uvećati 2 ili 4 puta koristeći tehniku detektovanja ivica.
Primer određivanja potrebnog broja impulsa:
Ako je enkoder opremljen mernim točkom, gde svaka revolucija odgovara udaljenosti od 200mm, a potrebna tačnost je 0.1mm, koja je potrebna rezolucija enkodera?
Nimp= 200mm/0.1mm=2000ppr
-Pulsna učestanost
Potrebna pulsna učestanost može biti izračunata kao fp=(Nimp x n)/60, gde je n brzina u o/min. Maksimalna pulsna učestanost je obično data u tehničkoj specifikaciji svakog enkodera i obično je oko 300kHz, ali može ići i do 800kHz kod enkodera visoke rezolucije. Najbolje je očitati vrednost za potrebnu pulsnu učestanost sa već formiranih dijagrama.
-Izlaz signala
Prvo se sinusni signal iz optičkog sistema enkodera digitalizuje u elektronskom kolu enkodera kako na raspolaganju bio kvadratni signal.
Za prenos signala postoje 2 opcije : RS422 (TTL kompatibilno) ili Push-pull (HTL) signal. Pri izboru pogodnog izlaznog signala za konkretnu aplikaciju, mora se razmotriti sledeće :
- --Tip kontrolera na koji dovodi izlazni signal iz enkodera
- --Potrebna, zahtevana dužina kabla
- --Prisustvo određenih električnih smetnji i interferencija
Push-pull (HTL) tip izlaznog signala je pogodan kada se enkoder povezuje na brojačke interface kartice(npr.takve kartice postoje na frekventnim regulatorima), na elektronske brojače ili ulaze PLC-a.
Postoje dve verzije Push-Pull izlaznog tipa signala. Prva je push-pull sa integrisanim podešavanjem talasne impedanse, gde je preporučena vrednost impedanse kabla 40...150Ohma. Ova verzija se preporučuje za aplikacije u kojima su neophodne velike dužine upravljačkih kablova, velike pulsne učestanosti i izlazni napon do 30V. Mogućnost je sa ili bez komplementarnih signala.
Druga je push-pull(7272).
-Preporučene dužine upravljačkih kablova u zavisnosti od tipa izlaznog signala
| Tip izlaznog signala | Preporučena dužina kabla |
| Push-pull bez invertovanih(komplementarnih) signala | 100m |
| Push-pull sa invertovanim(komplementarnim) signalima | 250m |
| Push-pull (7272) | 30m |
| RS422 sa invertovanim (komplementarnim)signalima | 1000m |
Zavisno od konkretne aplikacije, preporučene dužine kablova moraju se redukovati u sredinama gde su prisutne električne smetnje. Treba uvek koristiti zaštićene kablove i štit povezati na oba kraja( kontroler i enkoder). Ožičenje napajanja enkodera i ostala energetska ožičenja u blizini odvojiti od ožičenja izlaznog signala.
-Mehaničke osobine enkodera
Mehanički delovi enkodera (osovina i ležajevi) su podvrgnuti opterećenju iz sledećih razloga :
- --Dopuštena odstupanja prilikom montaže enkodera(radijalni i ugaoni pomak)
- --Termičke promene, npr.povećanje temperature dovodi do linearnog izduženja osovine
- --Habanje tokom rada i uticaj vibracija
Svi ovi faktori imaju uticaj na životni vek uređaja, naročito ležajeva, i uopšte na kvalitet izlaznog signala. Kako bi se smanjio uticaj navedenih pojava, moraju se instalirati dodatni mehanički elementi. Za enkodere sa punom osovinom to se obično radi sa spojnicama između osovine motora i enkodera. Rešenje za enkodere sa šupljom osovinom je korišćenje statorskih spojnica, nosača za pričvršćivanje itd.
U cilju izbegavanja trajnog oštećenja enkodera, dozvoljena opterećenja ležajeva ne smeju biti premašena. U slučaju enkodera sa šupljom osovinom, propisno montiran enkoder sa statorskim spojnicama originalne proizvodnje ( Kuebler ), ne bi trebalo da dodje do bilo kakvog problema. Za enkodere sa punom osovinom, maksimalna dozvoljena radijalna i aksijalna opterećenja su data u tehničkoj dokumentaciji.